Tripod Gait Modeling
in Robots
|
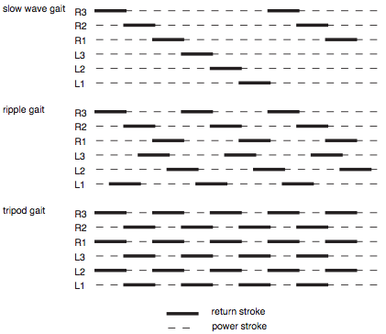
The tripod gait in insects involves three legs protracting (moving in a forward direction from the body), the same three legs exhibiting the power stroke (when the leg is on the ground, supporting the body, and from which it propels the body), followed by those three legs retracting (moving in a backwards direction from the body). As those three legs exhibit the power stoke, the other three legs are protracting. When the power stroke is complete and retraction is occurring, the other three legs are beginning the next power stroke. It is at this time that the three legs to begin motion begin the return stroke in preparation for the next power stroke (Ferrell, 1995).
During tripod gait, three legs move at a time while the other three remain stationary. In contrast to wheeled or tracked locomotion in robots, those with legs are able to operate on irregular and coarse terrain much more readily (Hörger et al, Year Unkown). They can alter various stages and aspects of their gaits in order to compensate for uneven terrain, including gait patterns, footfall trajectory, and also footholds. However, the risk of slippage upon a footfall requires legged robots to have methods of detection and correction in such events. If just one leg slips, it can affect the whole robot’s locomotion and require corrections in the whole gait and thus each leg (Hörger et al, Year Unkown). There are two main approaches to designing effective hexapod robot locomotion. The first assumes no knowledge of the terrain on which the robot is travelling, and relies on a consistent pattern in the gait with minimal sensing (Lee et al., 1988). The success of this method depends on the robot’s ability to tolerate slippage and tripping without correction and is purely dependent on the gait pattern. This makes the robot vulnerable to more extreme environments such as steep or slippery terrain (Hörger et al, Year Unkown). The second approach involves the equipping of the robot with sensors and thus allowing the environment to be known, and footfalls to be calculated to give maximum efficiency with minimal errors and maximum stability (Hauser et al., 2008) (Bretl et al., 2003) (Belter and Skrzypczynski, 2011) (Belter and Skrzypczynski, 2012). When a hexapod insect is walking at a rapid speed, it tends to use tripod gait. At a moderate speed, hexapods are seen using ripple gait, and at slow speeds they use wave gait. Tripod gait is the most common of these three to be adopted in hexapod robots due to its speed and stability. With three legs on the ground at all times, the tripod gait is very stable. And with six legs, if a leg is lost the insect still has a high probability of successful navigation of difficult terrain (Campos et al., 2010). |
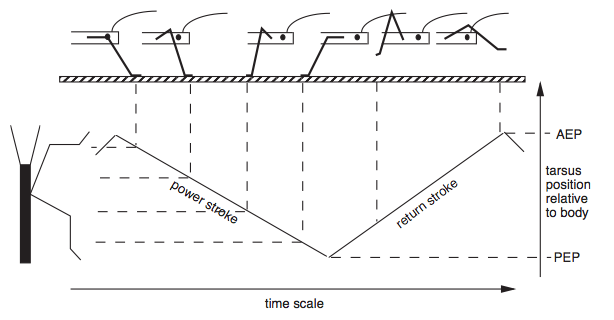
Stages of insect walking (Adapted from (Cruse, 1990) for (Ferrell, 1995)).
Insect gaits (adapted from (Wilson, 1966) for (Ferrell, 1995)).

Modified PhantomX hexapod with additional computing and sensing (Hörger et al., Year Unknown)
|
